




В поиске новых материалов для робототехники исследователи пытаются разработать гибкие сенсоры на давление, которые могли бы имитировать кожу. Сложная природа тактильных ощущений человека, передаваемых кожей, означает, что любой потенциальный сенсор такого типа должен распознавать давления в широком диапазоне значений, а также колебаний различной частоты.
Воспроизведение производительности механических рецепторов, ответственных за распознавание колебаний, является весьма сложной задачей, особенно при внедрении этой технологии в мягкие эластичные материалы. Как поясняет один из авторов исследования Ванджун Парк (Wanjun Park) из Университета Ханьян отмечает, что до настоящего времени в сенсорный элемент, распознающий вибрации, внедрялся аскелерометр, однако этот подход нельзя применять к искусственной коже, поскольку эти слишком жесткие для внедрения в материалы, имитирующие кожу.
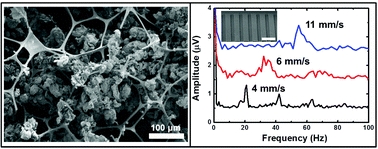
Для решения проблемы исследователи из группы Парка синтезировали эластичную полиуретановую губку, в которую были внедрены фрагменты пьезорезистивного графена. Было обнаружено, что концентрация диспергированного графена влияет на электропроводность всей губки.
Полученный сенсор генерирует отклик на незначительные воздействия, вызывающие деформацию губки и чешуек графена внутри неё. Изменение расстояния между фрагментами графена, вызванное деформацией сенсора, вызывает изменение сопротивления сенсора, которое можно измерить и пересчитать в давление. Гребни и впадины на губке, имитирующие отпечаток пальца человека, при перемещении сенсора по неровной поверхности могут детектировать и очень незначительные колебания.
Источник: Nanoscale, 2016, DOI: 10.1039/c6nr00774k